
Le plan :
Introduction
I/ Historique
et présentation
II/ Architecture
et structure des automates
I/ Historique et présentation
Les
automates programmables industriels sont apparus à la fin des années soixante, à la
demande de l'industrie automobile américaine (General Motor), qui
réclamait plus d'adaptabilité de leurs systèmes
de
commande.

Avant : utilisation de relais électromagnétiques
et de systèmes pneumatiques pour la réalisation des parties commandes = logique câblée.
Inconvénients : cher,
pas de flexibilité, pas de communication possible.
Solution : utilisation de systèmes à base de
microprocesseurs permettant une modification aisée des systèmes
automatisés = logique programmée.

L'Automate Programmable Industriel (API) est un appareil électronique programmable, adapté à l'environnement industriel, qui réalise des fonctions d'automatisme pour assurer la commande de pré actionneurs et d'actionneurs à partir d'informations logique, analogique ou numérique.


But de l’automatisation
• Augmenter
la sécurité
•
Accroître la productivité
•Augmenter
la compétitivité
• Économiser la matières première et l'énergie
• Superviser les installations et les machines
• Éliminer les tâches répétitives ou sans intérêt
• Simplifier le travail des
agents
II/ Architecture et structure des automates
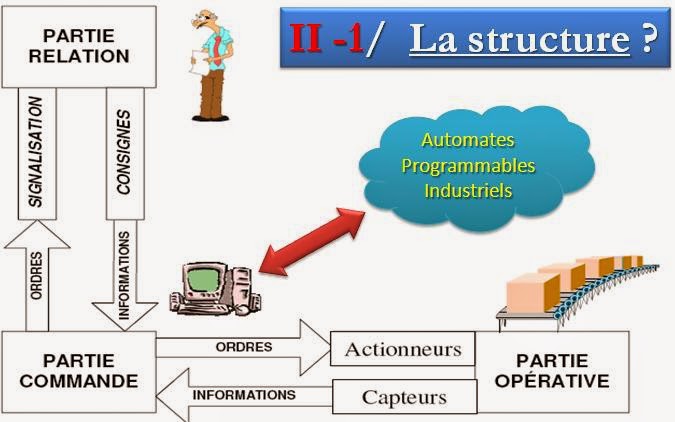
II – 1.1/ Structure détaillée d’un automate



II-2/ L’Architecture
?

La structure interne d’un API se présente comme suite:

L'automate programmable reçoit les informations relatives à l'état du système et puis commande les pré-actionneurs suivant le programme inscrit dans sa
mémoire.
Un API se compose donc
de trois grandes parties :

III/ Logique câblée VS
programmée






{kind=link}
0 تعليقات